OBJETIVOS
Objetivo General
Implementar y analizar un sistema automatizado de detección de proximidad utilizando sensor ultrasónico HC-SR04 y Arduino UNO, que active diferentes dispositivos de salida según rangos de distancia predefinidos.
Objetivos Específicos
- Programar un microcontrolador Arduino UNO para procesar señales del sensor ultrasónico HC-SR04
- Implementar lógica condicional para activar un LED cuando la distancia detectada sea mayor a 100 cm
- Configurar una alarma sonora (buzzer) que se active cuando la distancia sea menor a 100 cm
- Evaluar la precisión y confiabilidad del sistema de medición de distancia
MARCO TEÓRICO
Sensor Ultrasónico HC-SR04
Utiliza el principio de ecolocalización para medir distancias. Emite pulsos ultrasónicos de 40 kHz y calcula la distancia basándose en el tiempo que tarda el eco en regresar.
Microcontrolador Arduino UNO
Plataforma de desarrollo. Posee 14 pines digitales de entrada/salida, 6 entradas analógicas y opera a 16 MHz. Su capacidad de procesamiento permite manejar múltiples sensores y actuadores simultáneamente.
Lógica Condicional en Sistemas Embebidos
Los sistemas embebidos utilizan estructuras condicionales (if-else) para tomar decisiones basadas en datos de sensores. Esta lógica permite crear respuestas automatizadas y diferenciadas según las condiciones del entorno.
Actuadores de Salida
LED: Diodo emisor de luz que proporciona retroalimentación visual del estado del sistema. Buzzer: Transductor electroacústico que genera señales sonoras de alerta o notificación.

Circuito de Detección por Ultrasonido
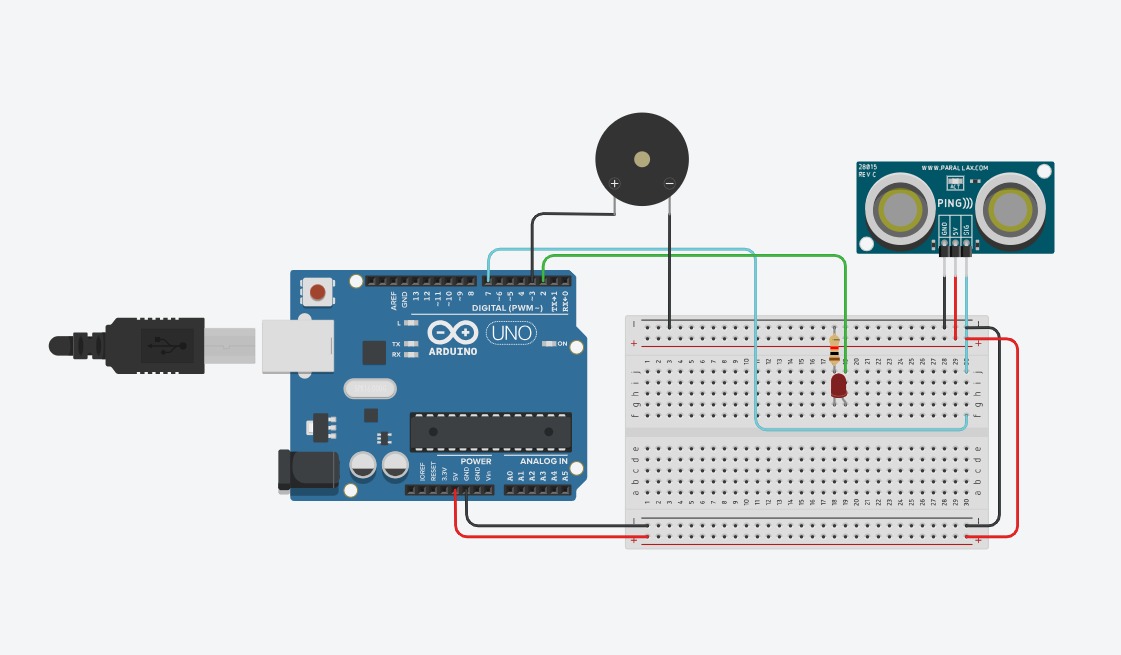
Esquema de Conexiones Arduino - HC-SR04
MATERIALES Y EQUIPO
PROCEDIMIENTO
Simulación en Tinkercad - Sistema de Detección
TABLA DE RESULTADOS - SISTEMA DE DETECCIÓN
| Distancia Objeto (cm) | Estado LED | Estado Buzzer | Observaciones |
|---|---|---|---|
| 150 | Encendido | Apagado | Led Activo |
| 100 | Apagado | Encendido | Cambio en umbral |
| 80 | Apagado | Encendido | Alarma activa |
ANÁLISIS Y DISCUSIÓN
- ¿El sistema respondió correctamente al umbral de 100 cm establecido?
- ¿Qué factores pueden afectar la precisión del sensor ultrasónico?
- ¿Cuál es el tiempo de respuesta del sistema de detección?
- ¿Qué aplicaciones prácticas tiene este tipo de sistema automatizado?
CONCLUSIONES
- Se implementó exitosamente un sistema de detección por ultrasonido con respuesta diferenciada según la distancia del objeto
- El umbral de 100 cm se estableció correctamente, permitiendo la alternancia entre LED y buzzer según la proximidad
- El sistema demostró alta confiabilidad y tiempo de respuesta adecuado para aplicaciones de tiempo real
- La programación condicional en Arduino permite crear sistemas adaptativos eficientes con recursos mínimos
- El sensor HC-SR04 mostró precisión aceptable en el rango de operación establecido
- Las aplicaciones potenciales del sistema son amplias, desde seguridad hasta asistencia en tareas cotidianas